LLM 训练全景:从架构原理到工程实践
本文旨在提供一份关于大语言模型(Large Language Models, LLMs) 技术栈的详尽综述,跨越从底层数学原理到大规模分布式系统工程的完整技术图谱,涵盖 Transformer 架构演进、万亿级参数训练基础设施、高效微调范式、人类价值观对齐算法以及生产级推理优化技术。
训练流程全景图
三大模型版本
| 版本 | 训练方式 | 特点 | 适用场景 |
|---|---|---|---|
| Base(基座) | 预训练 | 知识储备丰富,无指令遵循能力 | 知识检索、RAG、续写 |
| Instruct(指令) | SFT | 遵循指令,执行任务 | 结构化任务、API 调用 |
| Chat(对话) | RLHF/DPO | 自然对话,安全对齐 | 聊天机器人、AI 助手 |
对齐税(Alignment Tax)
经过 RLHF 对齐的模型可能在某些任务(如 RAG 检索)上表现不如基座模型,这被称为"对齐税"。选择模型版本需根据具体场景权衡。
1. 架构演进:现代 Transformer 重构
尽管 2017 年的原始 Transformer 奠定了 LLM 基础,但在迈向千亿参数和超长上下文的过程中,原始架构暴露出外推性差、训练不稳定、显存效率低等问题。现代主流 LLM(Llama 3、PaLM、Gemini)实际运行的是一套深度改良的"现代 Transformer"。
1.1 位置编码革命:从绝对到相对
位置编码是 Transformer 处理序列顺序的关键。早期的正弦波绝对位置编码在处理超过训练长度的序列时,外推性(Extrapolation)表现极差。
RoPE(旋转位置编码)
目前被 Llama、PaLM、Qwen 等主流模型广泛采用。
数学原理:将 $d$ 维的 Query/Key 向量视为 $d/2$ 个二维复数向量。对于位置 $m$ 的输入,通过旋转矩阵 $R_{\Theta, m}$ 进行变换,在复平面内将向量旋转角度 $m\theta$。
核心优势:
- 通过乘法实现相对位置信息注入
- 保持与绝对位置编码相同的计算复杂度
- 优异的长度外推能力,允许推理时处理比训练更长的序列
ALiBi(线性注意力偏置)
更激进的方案,彻底解决外推性问题。
实现机制:完全放弃 Embedding 层的位置向量,直接在 Attention 的 Softmax 之前添加与 Query-Key 距离成正比的静态线性惩罚项。距离越远,惩罚越大。
外推性能:使用 ALiBi 训练的模型(如 BLOOM)能平滑处理数倍于训练窗口长度的输入,无需额外训练成本。
1.2 注意力机制效率优化
全注意力的 $O(N^2)$ 复杂度是长序列建模的主要瓶颈。
所有 Query 头共享一对 K/V 头
KV Cache 降低 H 倍
模型表达能力下降
Query 头分 G 组共享 K/V
Llama 2/3 标配
速度与质量兼得
GQA 优势:达到接近 MQA 的推理速度和显存效率,同时保持 MHA 的模型质量。通过"Uptraining"技术,可将预训练好的 MHA 模型低成本转化为 GQA。
1.3 归一化与激活函数
| 技术 | 改进点 | 采用模型 |
|---|---|---|
| Pre-Norm | 将归一化置于残差连接外,梯度直接流过网络,提升深层训练稳定性 | 现代 LLM 标配 |
| RMSNorm | 去除均值中心化操作,减少 GPU 同步,加速训练 | Llama、PaLM |
| SwiGLU | Swish 门控的 GLU 变体,更强非线性表达,同等算力下更低 Perplexity | Llama、PaLM |
1.4 下一代架构
MoE(混合专家模型)
打破稠密模型计算瓶颈的首选路径(Mixtral 8x7B、DeepSeek-V3)。
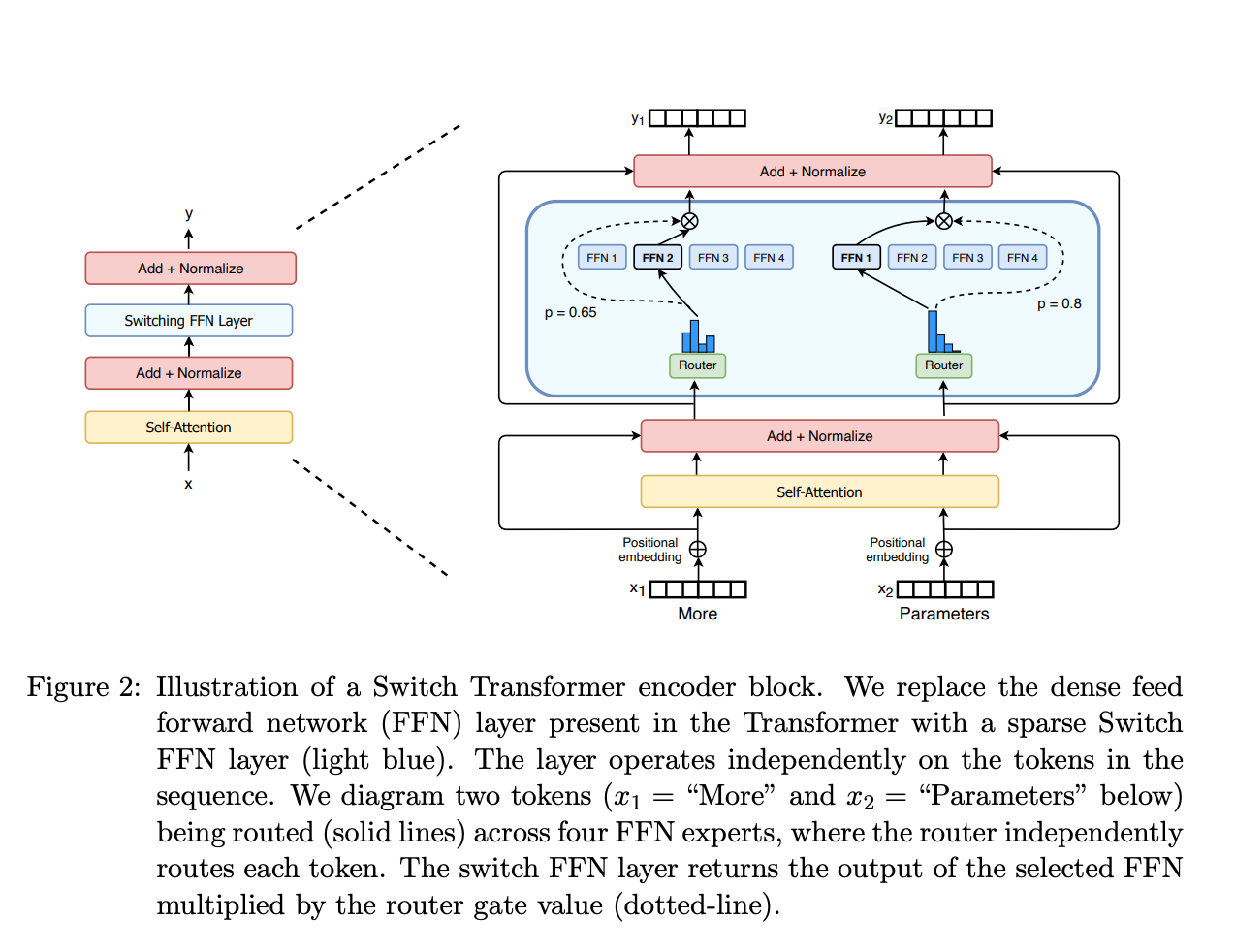 Switch Transformers 中的 MoE 层结构
Switch Transformers 中的 MoE 层结构
核心组件:
- 稀疏 MoE 层:替代传统 FFN 层,包含若干“专家”(通常 8 个),每个专家是独立的神经网络
- 门控网络/路由器:决定哪些 Token 发送到哪个专家,通常采用 Noisy Top-K Gating
稀疏激活:对于每个 Token,路由网络仅激活 Top-k(通常 1-2 个)专家计算。实现“训练万亿参数,推理百亿计算”。
负载均衡:训练损失中引入辅助损失(aux_loss),强制 Router 均匀分配 Token,防止“专家坍塞”。
| 特性 | 说明 |
|---|---|
| 预训练速度 | 比稠密模型更快(Switch Transformers 达 4×) |
| 推理速度 | 相同参数量下更快(仅激活部分专家) |
| 显存需求 | 高(所有专家需加载到内存) |
| 微调挑战 | 易过拟合,但指令调优效果显著 |
Switch Transformers
Google 的 Switch Transformers 采用单专家策略(Top-1),减少计算负担和通信成本,同时保持模型质量。1.6万亿参数模型已开源。
Mamba(状态空间模型)
挑战 Transformer 统治地位。基于选择性 SSM,推理时 $O(1)$ 状态更新,达到 $O(N)$ 线性时间复杂度。在长序列任务中展现更高吞吐和更低显存。
2. 数据工程:万亿 Token 的知识库
"Garbage In, Garbage Out" 数据质量是 LLM 性能的决定性因素。
2.1 数据处理流水线
| 步骤 | 技术细节 | 目的 |
|---|---|---|
| URL 过滤 | 黑名单过滤成人/暴力/垃圾站 | 源头阻断低质内容 |
| 文本提取 | Trafilatura 解析 HTML | 去除导航栏、广告噪声 |
| 语言识别 | FastText (CCNet) | 过滤非目标语言 |
| 质量过滤 | 启发式规则 + BERT 分类器 | 剔除机器生成、乱码 |
| PII 去除 | 正则匹配 Email/IP/电话 | 隐私保护 |
| 去重 | MinHash LSH + Exact Match | 防止记忆样本,提升泛化 |
去重的重要性
模糊去重通过 MinHash 算法识别并去除只有细微差异的重复文档(如转载新闻),对提升 Zero-shot 能力至关重要,也是防止基准测试数据泄漏的关键。
2.2 Tokenization 策略
BPE(Byte-Pair Encoding):GPT-4、Llama 3 采用。从字符级开始,迭代合并最频繁字节对。现代实现直接在 UTF-8 字节层面操作,支持零样本处理任何 Unicode(代码、Emoji、小语种)。
词表大小权衡:
- 大词表(Llama 3: 128k) 编码效率高,但增加 Embedding/Softmax 参数量
- 小词表 序列更长,训练成本增加
3. 分布式训练:驯服算力巨兽
参考:DeepSpeed ZeRO 官方文档 | 分布式训练详解 | 大模型训练技术
训练千亿参数模型需要数千张 GPU 协同工作,单一并行策略已无法满足需求。
3.1 多维并行策略(3D/4D Parallelism)
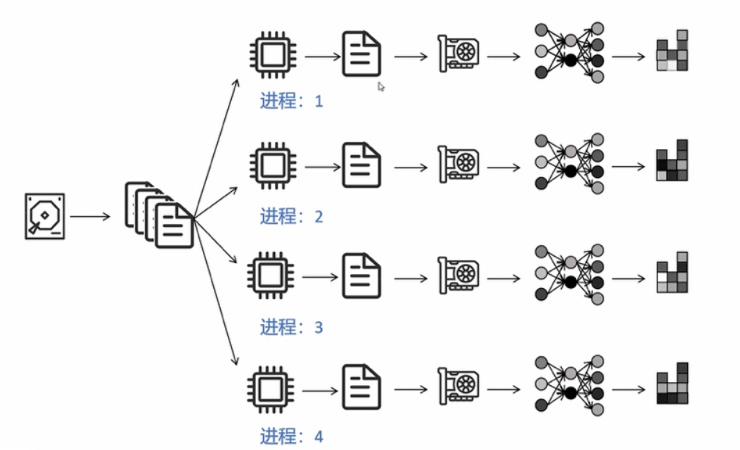 数据并行(DP)原理示意图
数据并行(DP)原理示意图
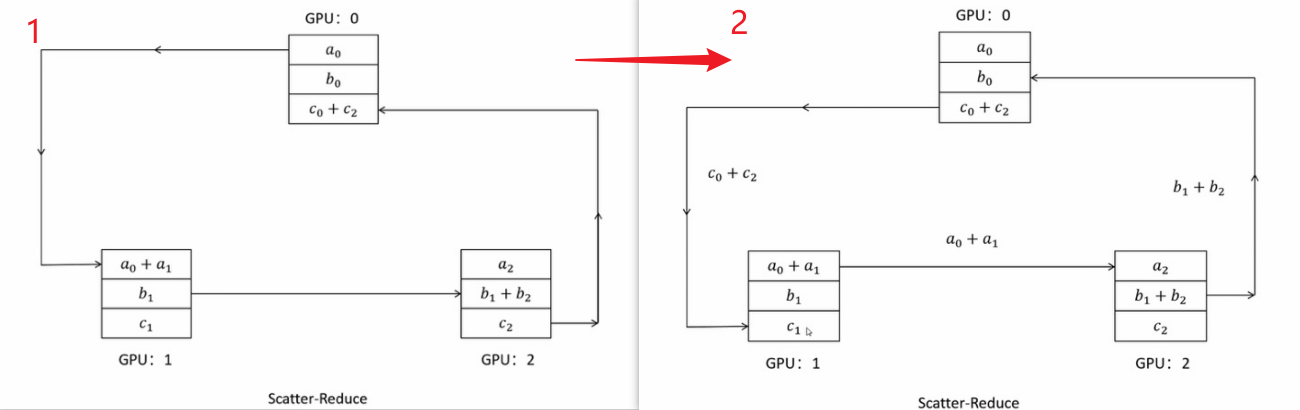 DDP 使用 Ring-AllReduce 进行梯度同步
DDP 使用 Ring-AllReduce 进行梯度同步
| 策略 | 原理 | 通信特点 | 适用场景 |
|---|---|---|---|
| 数据并行 (DP) | 复制模型,切分 Batch | All-Reduce 梯度 | 基础策略 |
| 张量并行 (TP) | 切分权重矩阵(Megatron-LM) | 每层 All-Reduce | 节点内 (NVLink) |
| 流水线并行 (PP) | 不同层放不同设备 | 点对点传输 | 跨节点 |
| 序列并行 (SP) | 切分序列维度 (DeepSpeed Ulysses) | All-to-All | 超长上下文 |
3.2 ZeRO(零冗余优化器)
DeepSpeed 核心贡献,解决数据并行中模型状态冗余存储问题
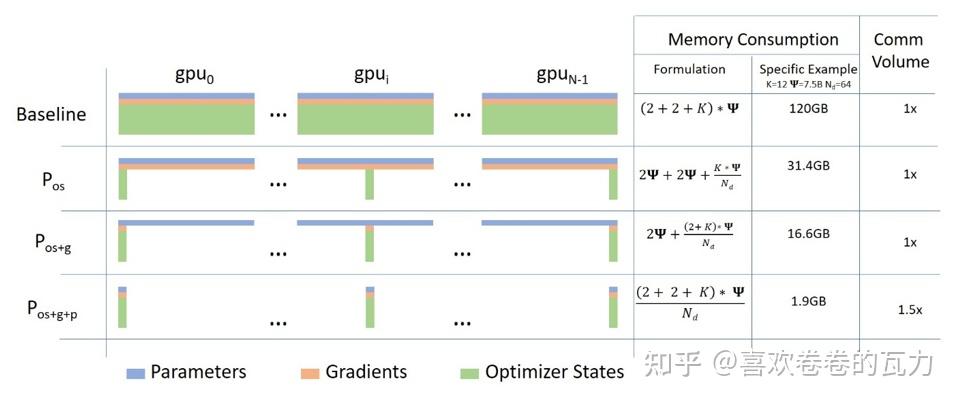 ZeRO 各阶段显存优化效果
ZeRO 各阶段显存优化效果
问题:传统数据并行中,每个 GPU 都保存完整的模型状态(参数、梯度、优化器状态),造成大量冗余。
核心思想:将模型状态分片存储到不同 GPU,需要时再收集。
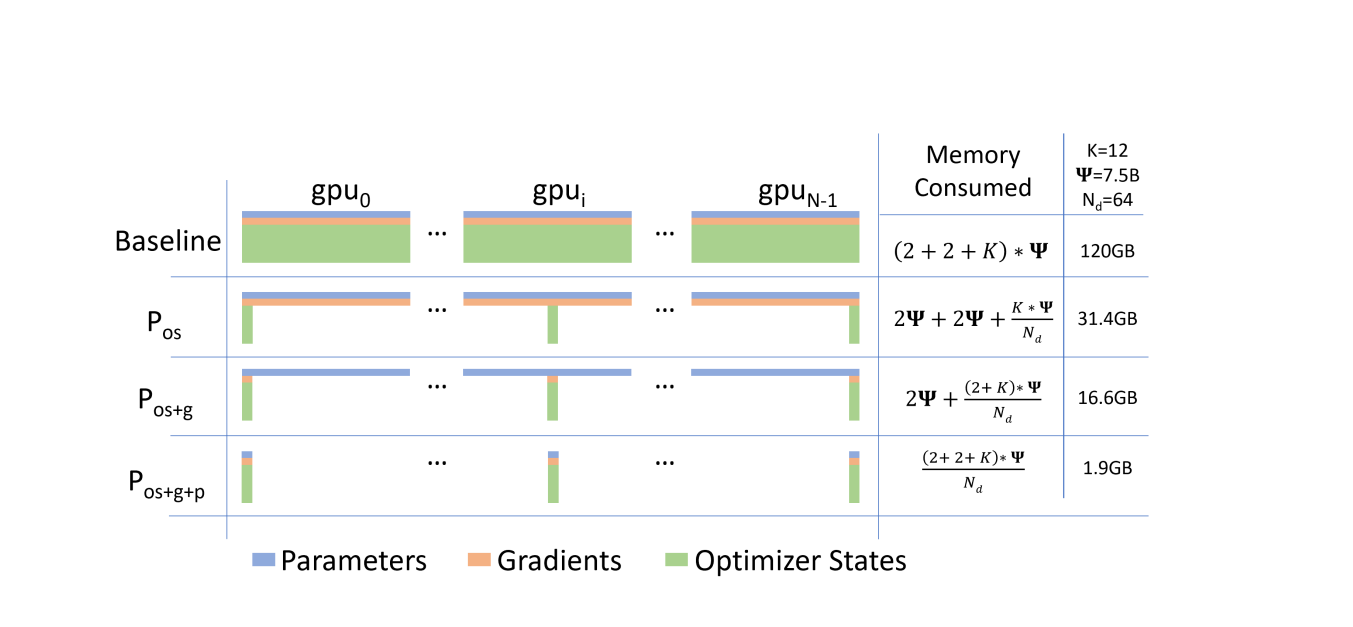 ZeRO Stage 1/2/3 显存占用对比
ZeRO Stage 1/2/3 显存占用对比
ZeRO 三阶段
| 阶段 | 切分内容 | 显存节省 | 说明 |
|---|---|---|---|
| Stage 1 | 优化器状态 | 4× | Adam 的 32-bit 权重、一阶矩、二阶矩分片 |
| Stage 2 | + 梯度 | 8× | 16-bit 梯度也分片,每个进程仅保留对应分片 |
| Stage 3 | + 模型参数 | 线性扩展 | 16-bit 参数也分片,前向/反向时自动收集和释放 |
ZeRO-3 工作流程:
- 前向传播:需要某层参数时,从其他 GPU 收集(All-Gather)
- 计算完成:立即释放非本地分片,节省显存
- 反向传播:同样按需收集参数,计算梯度后分片存储
- 优化器更新:每个 GPU 仅更新自己负责的参数分片
ZeRO-Offload 与 ZeRO-Infinity
 ZeRO-Offload 将优化器状态卸载到 CPU
ZeRO-Offload 将优化器状态卸载到 CPU
| 技术 | 说明 |
|---|---|
| ZeRO-Offload | 将优化器状态和梯度卸载到 CPU 内存 |
| ZeRO-Infinity | 进一步支持卸载到 NVMe SSD,训练万亿参数模型 |
ZeRO-Infinity 特性:
- 支持将参数、梯度、优化器状态卸载到 CPU/NVMe
- 内存中心分块(Memory-Centric Tiling):将大算子拆分为小块顺序执行
- 无需模型并行即可训练任意大小模型
 Gradient Checkpointing 原理示意
Gradient Checkpointing 原理示意
DeepSpeed ZeRO 配置示例
# ZeRO Stage 3 配置
ds_config = {
"zero_optimization": {
"stage": 3,
"offload_param": {
"device": "cpu", # 或 "nvme"
"pin_memory": True
},
"offload_optimizer": {
"device": "cpu",
"pin_memory": True
},
"overlap_comm": True,
"contiguous_gradients": True
}
}
# 构建超大模型
with deepspeed.zero.Init():
model = MyLargeModel()3.3 激活重算(Activation Checkpointing)
前向传播不保存中间激活值,反向传播时重新计算。
权衡:以约 30% 额外计算换取 5-10× 显存节省
适用场景:
- 更大 Batch Size
- 更长序列长度
- 更深网络
3.4 混合精度训练
| 精度 | 位宽 | 说明 |
|---|---|---|
| FP32 | 32-bit | 主权重(Master Weights) |
| FP16/BF16 | 16-bit | 前向/反向计算 |
| FP8 | 8-bit | 最新硬件支持(H100) |
BF16 vs FP16:
- BF16:动态范围大(与 FP32 相同),训练更稳定,无需 Loss Scaling
- FP16:精度更高,但需要 Loss Scaling 防止下溢
3.5 训练稳定性:Loss Spike
成因:AdamW 二阶矩估计问题。训练后期梯度范数变小,遇到"坏数据"导致梯度突增时,全局裁剪阈值未能及时生效。
解决方案:
- AdaGC:动态调整裁剪阈值
- Checkpoint 回滚:跳过导致 Spike 的数据
- QK-Norm:在 Query/Key 上加 LayerNorm
- 梯度裁剪:设置合理的
max_grad_norm
3.6 分布式训练框架对比
| 框架 | 核心技术 | 优势 | 适用场景 |
|---|---|---|---|
| DeepSpeed | ZeRO、Offload | 显存效率高、易用 | 通用大模型训练 |
| Megatron-LM | 3D 并行 | 极致性能 | 超大规模预训练 |
| FSDP | PyTorch 原生 | 生态兼容 | PyTorch 用户 |
| Colossal-AI | 异构并行 | 灵活配置 | 研究探索 |
4. 参数高效微调(PEFT)
全量微调成本高昂且易导致灾难性遗忘。PEFT 允许仅更新极少量参数即可达到媲美效果。
4.1 LoRA(低秩适配)
目前最主流的微调技术,通过低秩矩阵分解实现参数高效微调。
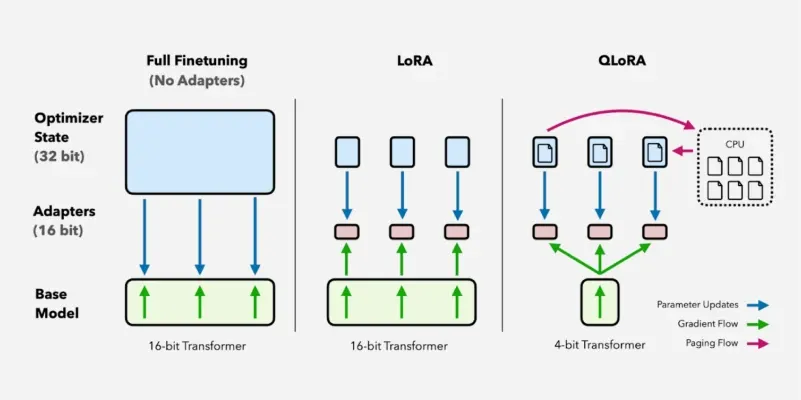 LoRA 与 QLoRA 对比示意图
LoRA 与 QLoRA 对比示意图
原理:假设权重更新量 $\Delta W$ 具有低秩特性。冻结预训练权重 $W_0$,注入两个低秩矩阵:
$$W_{new} = W_0 + \Delta W = W_0 + BA \quad (rank \ll d)$$
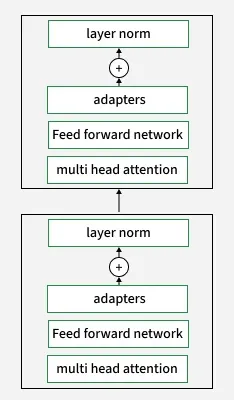 Transformer 中的 LoRA 适配器位置
Transformer 中的 LoRA 适配器位置
核心特性:
| 特性 | 说明 |
|---|---|
| 参数效率 | 仅更新 0.5%-5% 参数(vs 全量微调 100%) |
| 显存节省 | 减少 70% 显存使用,不存储优化器状态 |
| 零推理延迟 | $BA$ 可合并回 $W_0$,无额外推理成本 |
| 多任务支持 | 不同任务加载不同 LoRA 适配器 |
| 低过拟合风险 | 训练参数少,尤其适合小数据集 |
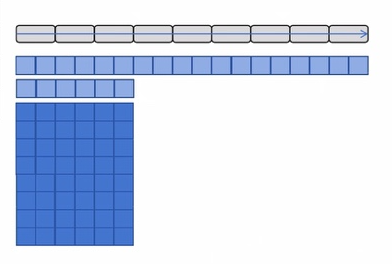
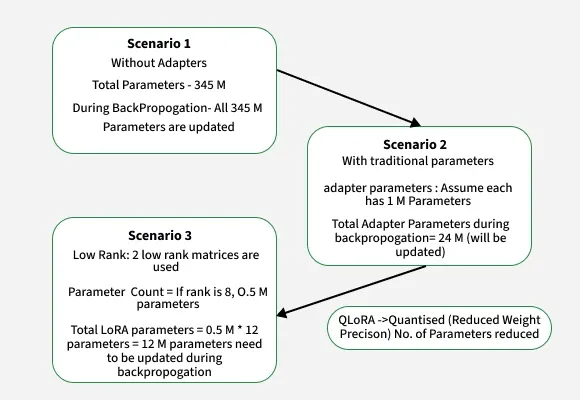 全量微调、Adapter 和 LoRA 参数量对比
全量微调、Adapter 和 LoRA 参数量对比
性能对比:LoRA 在文本分类、摘要、问答等任务上达到接近全量微调的效果(GLUE 分数差距 < 1%),但在数学、编程等复杂领域全量微调仍有优势。
4.2 QLoRA
将 LoRA 与 4-bit 量化结合,进一步降低微调门槛。
工作原理:
- 基座模型以 4-bit 量化格式加载,大幅减少显存占用
- LoRA 适配器保持高精度(16-bit)训练
- 仅更新适配器参数,补偿量化误差
| 技术 | 作用 |
|---|---|
| NF4 量化 | 4-bit 加载预训练模型,专为正态分布权重设计 |
| 双重量化 | 量化量化常数(scale/offset),进一步压缩存储 |
| 分页优化器 | 显存不足时自动卸载到 CPU |
| 适配器位置 | 建议应用到所有线性 Transformer 层 |
效果:
- 单张 48GB 显卡可微调 65B 模型
- 消费级 GPU 可微调数十亿参数模型
- 性能损失可忽略不计,与标准 LoRA 和全量微调精度相当
权衡
QLoRA 由于量化/反量化步骤,训练速度略慢于 LoRA,但显存节省极为显著。
4.3 微调方法对比
| 方法 | 参数更新 | 资源需求 | 适用场景 |
|---|---|---|---|
| 全量微调 | 100% | 极高 | 资源充足,追求最佳 |
| LoRA/QLoRA | <1% | 低 | 消费级硬件 |
| Adapter | <5% | 中 | 多任务适配 |
| Prefix Tuning | <1% | 低 | 特定任务优化 |
5. 对齐技术:赋予模型价值观
参考:RLHF之PPO、DPO详解 | DPO原理深度解析 | RLHF技术问答
预训练赋予模型"知识",对齐赋予模型"指令遵循"能力和安全价值观。
5.1 强化学习基础
强化学习(RL)研究智能体(Agent)与环境(Environment)交互的问题,目标是最大化奖励(Reward)。
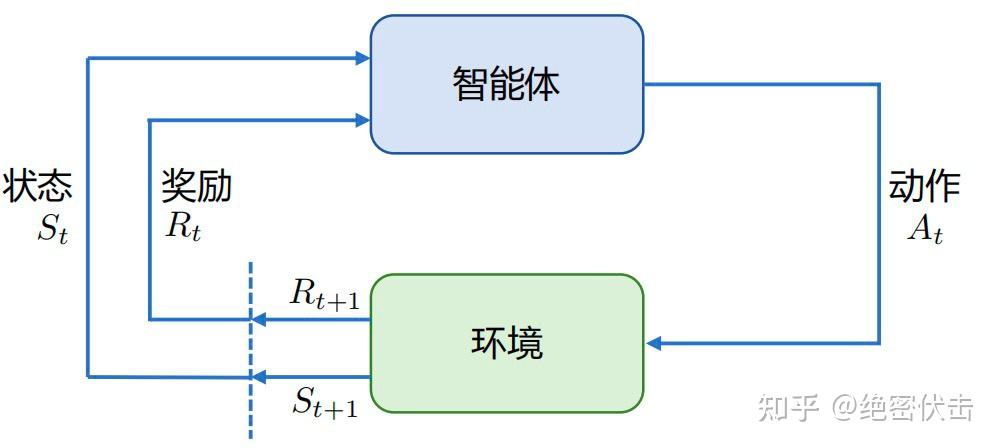 图1:强化学习基本框架:智能体与环境交互
图1:强化学习基本框架:智能体与环境交互
核心概念:
| 概念 | 说明 |
|---|---|
| 状态(State) | 环境的当前状况,用 $s$ 表示 |
| 动作(Action) | 智能体采取的行为,用 $a$ 表示 |
| 奖励(Reward) | 环境对动作的反馈,用 $r$ 表示 |
| 策略(Policy) | 从状态到动作的映射函数 $\pi(a |
| 价值函数(Value) | 对未来累积奖励的预测 $V(s)$ 或 $Q(s,a)$ |
| 轨迹(Trajectory) | 状态-动作序列 $\tau = (s_0, a_0, s_1, a_1, ...)$ |
策略类型:
- 随机性策略:$\pi(a|s) = p(a_t = a | s_t = s)$ 输出动作概率分布,采样得到动作
- 确定性策略:$a^* = \arg\max_a \pi(a|s)$ 直接输出最优动作
价值函数定义:
$$V_\pi(s) = \mathbb{E}\pi \left[ \sum^{\infty} \gamma^k r_{t+k+1} | s_t = s \right]$$
$$Q_\pi(s, a) = \mathbb{E}\pi \left[ \sum^{\infty} \gamma^k r_{t+k+1} | s_t = s, a_t = a \right]$$
其中 $\gamma$ 为折扣因子,权衡短期与长期奖励。
5.1.1 强化学习 vs SFT
| 对比维度 | SFT(监督微调) | 强化学习 |
|---|---|---|
| 反馈粒度 | 针对单个 Token | 针对整个输出文本 |
| 表达多样性 | 要求确切答案 | 兼顾多样性 |
| 幻觉问题 | 易导致模型强行回答 | 可通过奖励设计让模型学会"拒绝回答" |
| 多轮对话 | 难以考虑整体对话目标 | 可建模多轮交互的累积奖励 |
5.2 RLHF(人类反馈强化学习)
ChatGPT 背后的核心技术,分为奖励模型训练和近端策略优化两个步骤。
三阶段流程:
- SFT(监督微调):高质量指令数据上监督微调,获得初始策略模型
- Reward Modeling:收集人类偏好排序数据,训练奖励模型
- PPO:用 RM 作为环境反馈,最大化奖励同时 KL 约束防止偏离
5.2.1 奖励模型(Reward Model)
奖励模型模拟人类偏好,为模型训练提供持续的奖励信号。
输入格式:包含 chosen(好回答)和 rejected(差回答)的 pair 对
模型结构:基于 Transformer 架构,移除最后一个非嵌入层,叠加线性层输出标量奖励值
损失函数: $$\mathcal{L}{RM} = -\log \sigma(r\theta(x, y_w) - r_\theta(x, y_l))$$
其中 $r_\theta$ 是奖励模型,$y_w$ 是好回答,$y_l$ 是差回答。目标是让好回答的得分尽可能高于差回答。
5.2.2 PPO(近端策略优化)
PPO 是 OpenAI 广泛使用的强化学习算法,解决了传统策略梯度方法的高方差、低效率、易发散问题。
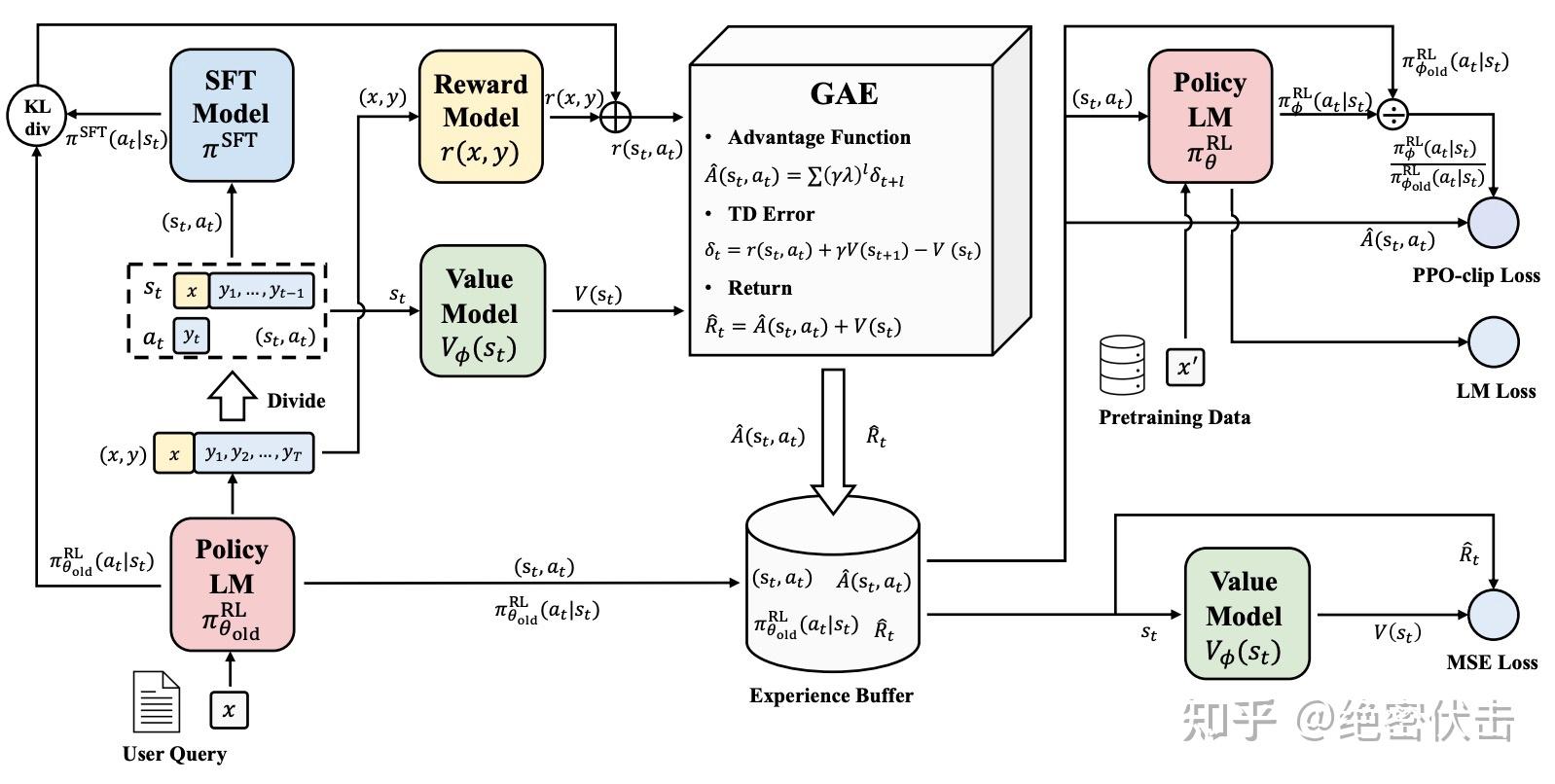 图2:PPO 算法实施流程
图2:PPO 算法实施流程
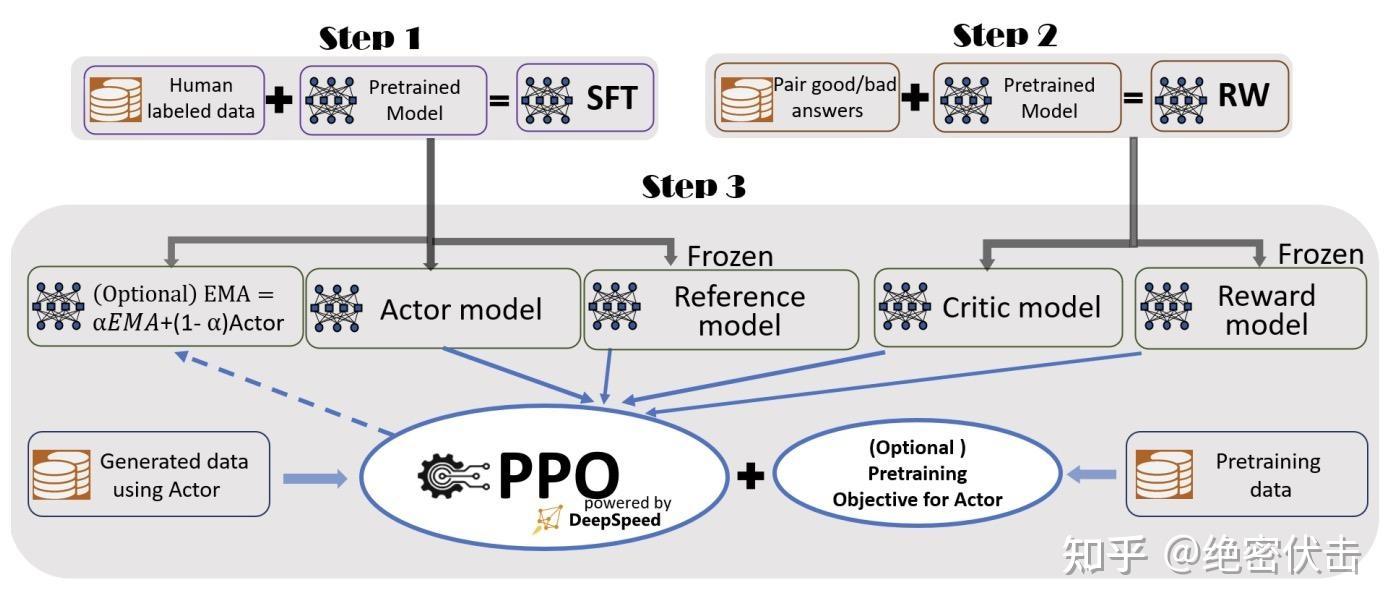 图3:PPO 训练流程详解
图3:PPO 训练流程详解
PPO 涉及 4 个模型:
| 模型 | 作用 | 是否更新 |
|---|---|---|
| Policy Model(策略模型) | 生成模型回复,即 Actor | ✅ 更新 |
| Reward Model(奖励模型) | 评估回复质量,输出奖励分数 | ❌ 冻结 |
| Critic Model(评论模型) | 预测回复的未来累积收益 | ✅ 更新 |
| Reference Model(参考模型) | SFT 模型备份,计算 KL 散度 | ❌ 冻结 |
PPO 实施流程:
策略梯度核心公式:
$$\nabla_\theta J(\theta) = \mathbb{E}{\tau \sim \pi\theta} \left[ \sum_{t=0}^{T} \nabla_\theta \log \pi_\theta(a_t|s_t) \cdot A_t \right]$$
其中 $A_t$ 是优势函数,衡量特定动作相比平均动作的优势。
PPO Clip 目标函数:
$$L^{CLIP}(\theta) = \mathbb{E}_t \left[ \min \left( r_t(\theta) A_t, \text{clip}(r_t(\theta), 1-\epsilon, 1+\epsilon) A_t \right) \right]$$
其中 $r_t(\theta) = \frac{\pi_\theta(a_t|s_t)}{\pi_{\theta_{old}}(a_t|s_t)}$ 是重要性采样比率,$\epsilon$ 通常取 0.1-0.2。
RLHF 中的 PPO 优化目标(带 KL 约束):
$$\max_{\pi_\theta} \left{ \mathbb{E}{x \sim D, y \sim \pi\theta(y|x)} [r_\phi(x,y)] - \beta \cdot D_{KL}[\pi_\theta(y|x) || \pi_{ref}(y|x)] \right}$$
On-Policy vs Off-Policy:
- On-Policy:采样和学习使用同一策略,数据不可复用
- Off-Policy(PPO):分离采样和学习策略,可重复利用历史数据,提升训练效率
局限:涉及 4 个模型协同训练,超参敏感,极不稳定,对计算资源要求极高。
5.3 DPO(直接偏好优化)
2023年斯坦福提出,PPO 的简化版,极大节省训练开销
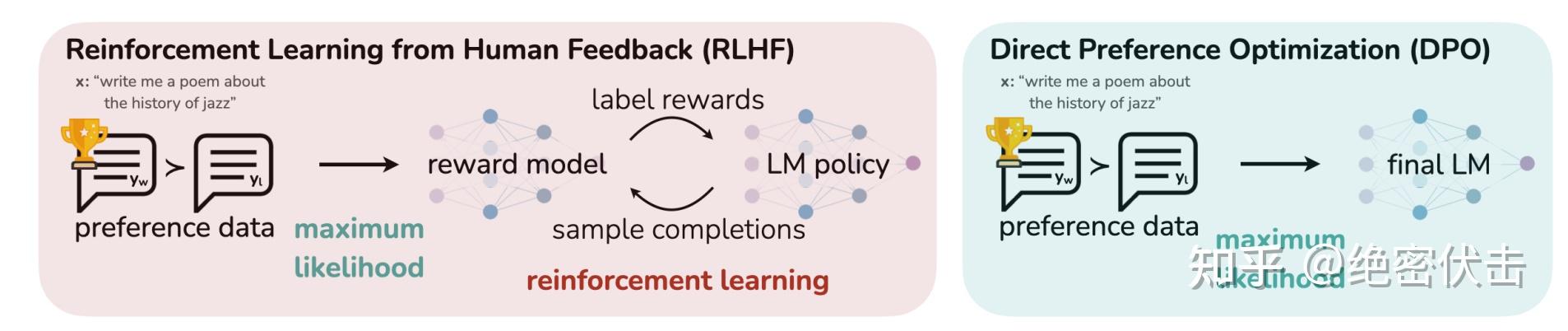 图7:PPO 和 DPO 的区别
图7:PPO 和 DPO 的区别
DPO 只需加载 2 个模型(Actor + Reference),不需要在线采样数据。
核心洞察:RLHF 的优化目标存在显式解,可以将奖励函数与最优策略建立解析映射。
5.3.1 从 PPO 到 DPO 的数学推导
Step 1:PPO 的最优策略形式
在 KL 正则化约束下,PPO 的最优策略可以写为:
$$\pi^*(y|x) = \frac{1}{Z(x)} \pi_{ref}(y|x) \exp\left(\frac{1}{\beta} r(x,y)\right)$$
其中 $Z(x) = \sum_y \pi_{ref}(y|x) \exp\left(\frac{1}{\beta} r(x,y)\right)$ 是归一化的分区函数。
Step 2:重参数化奖励函数
将上式对数化并重排,可以得到奖励函数的形式:
$$r(x,y) = \beta \log \frac{\pi^*(y|x)}{\pi_{ref}(y|x)} + \beta \log Z(x)$$
注意 $Z(x)$ 只与 $x$ 有关,在计算偏好概率时会被消去。
Step 3:代入 Bradley-Terry 偏好模型
偏好数据遵循 Bradley-Terry 模型,其偏好概率为:
$$p(y_1 \succ y_2 | x) = \frac{\exp(r(x, y_1))}{\exp(r(x, y_1)) + \exp(r(x, y_2))}$$
代入重参数化后的 $r(x,y)$,并消去 $Z(x)$,得到:
$$p(y_w \succ y_l | x) = \sigma \left( \beta \log \frac{\pi_\theta(y_w|x)}{\pi_{ref}(y_w|x)} - \beta \log \frac{\pi_\theta(y_l|x)}{\pi_{ref}(y_l|x)} \right)$$
Step 4:最终 DPO 损失函数
$$\mathcal{L}{DPO}(\pi\theta; \pi_{ref}) = -\mathbb{E}{(x, y_w, y_l) \sim D}\left[\log \sigma \left(\beta \log \frac{\pi\theta(y_w|x)}{\pi_{ref}(y_w|x)} - \beta \log \frac{\pi_\theta(y_l|x)}{\pi_{ref}(y_l|x)}\right)\right]$$
DPO 本质:将 RLHF 巧妙转化为类似 SFT 的监督学习,隐式学习奖励函数。训练时只需 Actor 和 Reference 两个模型,无需 Reward Model 和 Critic Model。
5.3.2 DPO vs PPO 深度对比
| 维度 | PPO | DPO |
|---|---|---|
| 模型数量 | 4 个(Actor, Critic, RM, Ref) | 2 个(Actor, Ref) |
| 在线采样 | 需要 | 不需要 |
| 奖励模型 | 显式训练 | 隐式包含在策略中 |
| 训练稳定性 | 低(超参敏感) | 高(类似 SFT) |
| 数据效率 | 低(需大量在线数据) | 高(复用偏好数据) |
| 理论完备性 | 原始强化学习框架 | 基于 PPO 等价推导 |
| 实际效果 | 工业界首选(OpenAI、Anthropic) | 开源社区首选 |
DPO 的局限性
- 离线数据瓶颈:DPO 依赖预先收集的偏好数据,无法在线探索新策略
- 分布偏移:当策略偏离参考模型过远时,偏好数据可能不再准确
- 长度偏差:DPO 可能倾向于生成更长的回复以获得更高分数
4 个模型协同训练
需要在线采样
超参敏感,训练不稳定
显存需求极高
仅需 2 个模型
离线训练,无需采样
类似 SFT 的简单流程
开源社区首选
5.4 DPO 变种
DPO 因其简单易用迅速成为大模型训练标配,衍生出多种变种:
| 变种 | 特点 | 解决问题 |
|---|---|---|
| SimPO | 简化参考模型依赖,使用长度归一化 | 减少计算开销,解决长度偏差 |
| Step-DPO | 分步骤优化,每步单独打分 | 提升推理任务表现 |
| MCTS-DPO | 结合蒙特卡洛树搜索 | 增强探索能力 |
| SPO | 自我对弈优化 | 减少人类标注依赖 |
| Iterative-DPO | 迭代式在线采样 | 解决分布偏移问题 |
| IPO | 添加正则项防止过拟合 | 提升泛化能力 |
| KTO | 仅需二元反馈(好/坏) | 简化数据收集 |
Iterative-DPO(迭代式DPO)
2024年 Meta 提出的改进版(Iterative Reasoning Preference Optimization),介于 Online 和 Offline 之间。
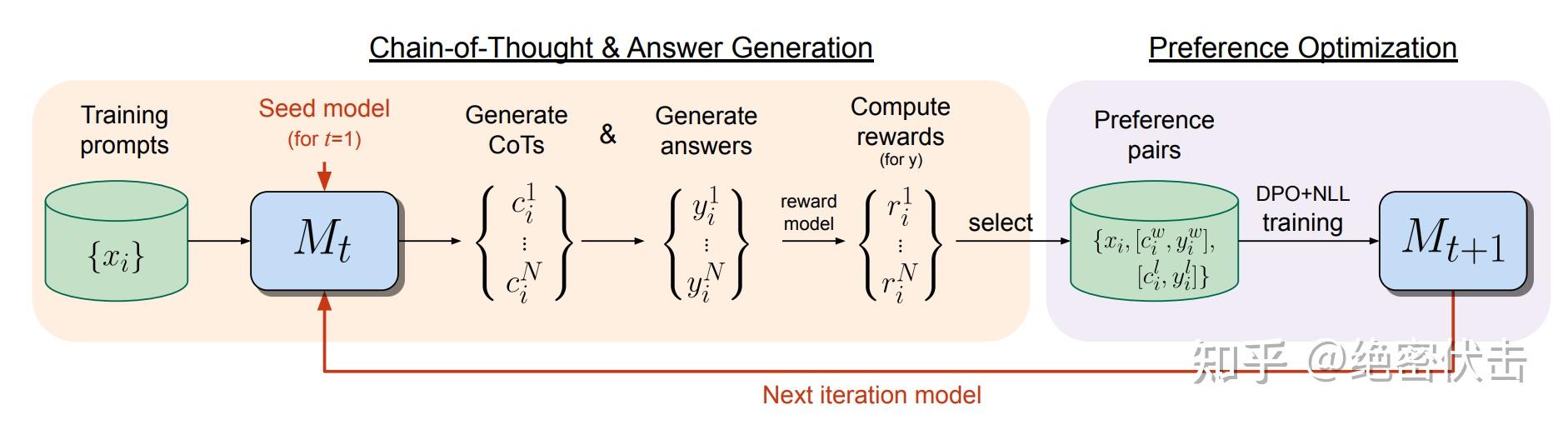 图8:Iterative-DPO 流程
图8:Iterative-DPO 流程
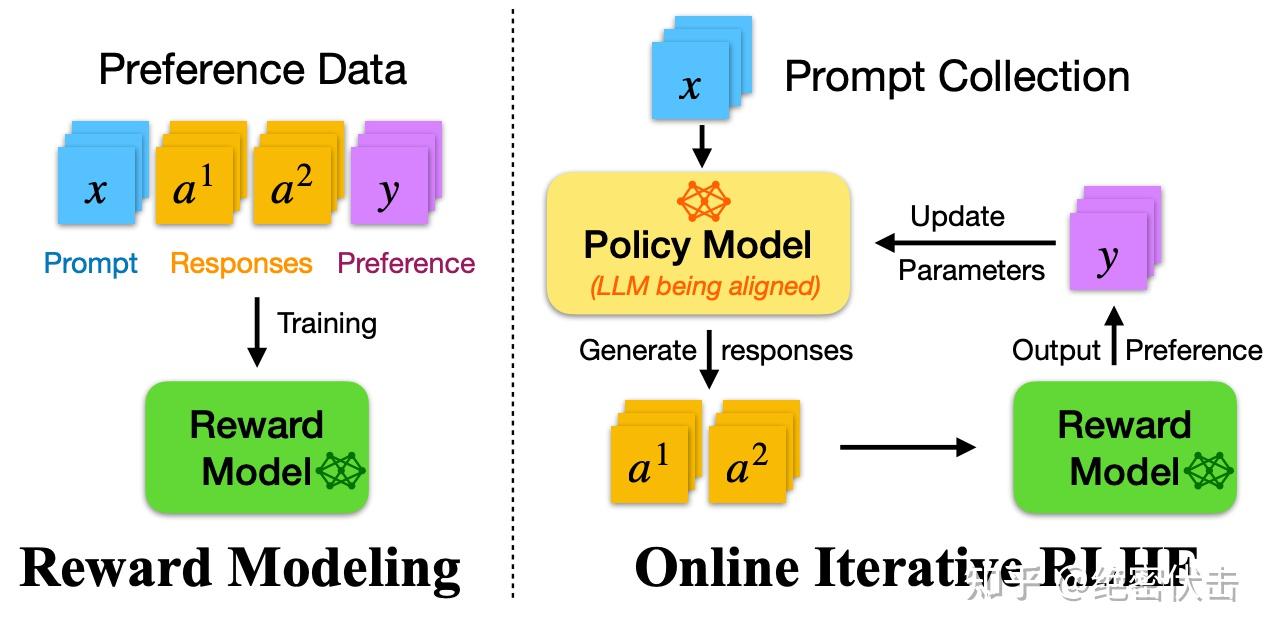 图9:Iterative-DPO 两阶段流程
图9:Iterative-DPO 两阶段流程
流程:
- 训练 Reward Model
- 将数据分成 m 份
- 对每份数据:用当前 LLM 采样 k 个回答 → RM 打分 → 选最高/最低构建 pair 对 → 训练一轮 DPO → 更新 LLM
- 重复直到所有数据训练完成
优势:
- 每轮训练后基于最新模型重新采样,数据质量持续提升
- 介于 Online-Policy 和 Offline-Policy 之间,平衡效率与效果
- 缓解 DPO 的分布偏移问题
对齐技术发展趋势
6. 推理优化:极致速度与吞吐
参考:FlashAttention 详解 | Hopsworks FlashAttention | FlashAttention GitHub | vLLM 官方博客 | PagedAttention 论文 | KV Cache 详解 | 推理优化综述
推理核心目标:降低延迟(Latency)+ 提升吞吐量(Throughput)。
6.1 GPU 内存层次
理解推理优化需要先了解 GPU 内存层次:
| 内存类型 | 容量 | 速度 | 说明 |
|---|---|---|---|
| HBM(高带宽内存) | 大(40-80GB) | 慢 | 存储模型权重、KV Cache |
| SRAM(片上内存) | 小(~20MB) | 极快 | 计算时的临时存储 |
瓶颈本质:Attention 计算是内存带宽受限(Memory-bound)而非算力受限(Compute-bound)。频繁的 HBM ↔ SRAM 数据传输成为性能瓶颈。
6.2 FlashAttention
由 Tri Dao 等人提出,已成为 LLM 训练和推理的标配技术 论文:FlashAttention: Fast and Memory-Efficient Exact Attention with IO-Awareness
FlashAttention 已广泛应用于 GPT-3、GPT-4、Llama2、Falcon2、Megatron-LM 等知名 LLM,并集成到 PyTorch 2.0 中。
 FlashAttention 分块计算原理
FlashAttention 分块计算原理
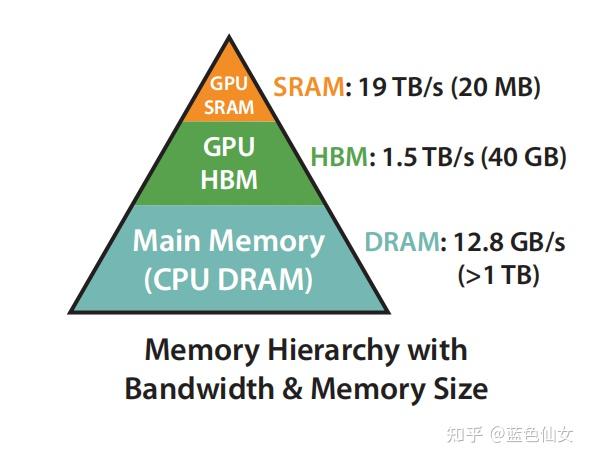 GPU 内存层次:HBM vs SRAM
GPU 内存层次:HBM vs SRAM
6.2.1 为什么需要 FlashAttention
问题根源:Transformer 中 Self-Attention 的时间和内存复杂度是序列长度的二次方 $O(N^2)$,序列过长时算法速度变慢且消耗大量内存。
标准 Attention 计算: $$\mathbf{S} = \mathbf{Q}\mathbf{K}^{\top} \in \mathbb{R}^{N \times N}, \quad \mathbf{P} = \text{softmax}(\mathbf{S}), \quad \mathbf{O} = \mathbf{P}\mathbf{V}$$
标准实现需要将中间矩阵 $\mathbf{S}$、$\mathbf{P}$ 存储在 HBM 中,需要 $O(N^2)$ 内存。
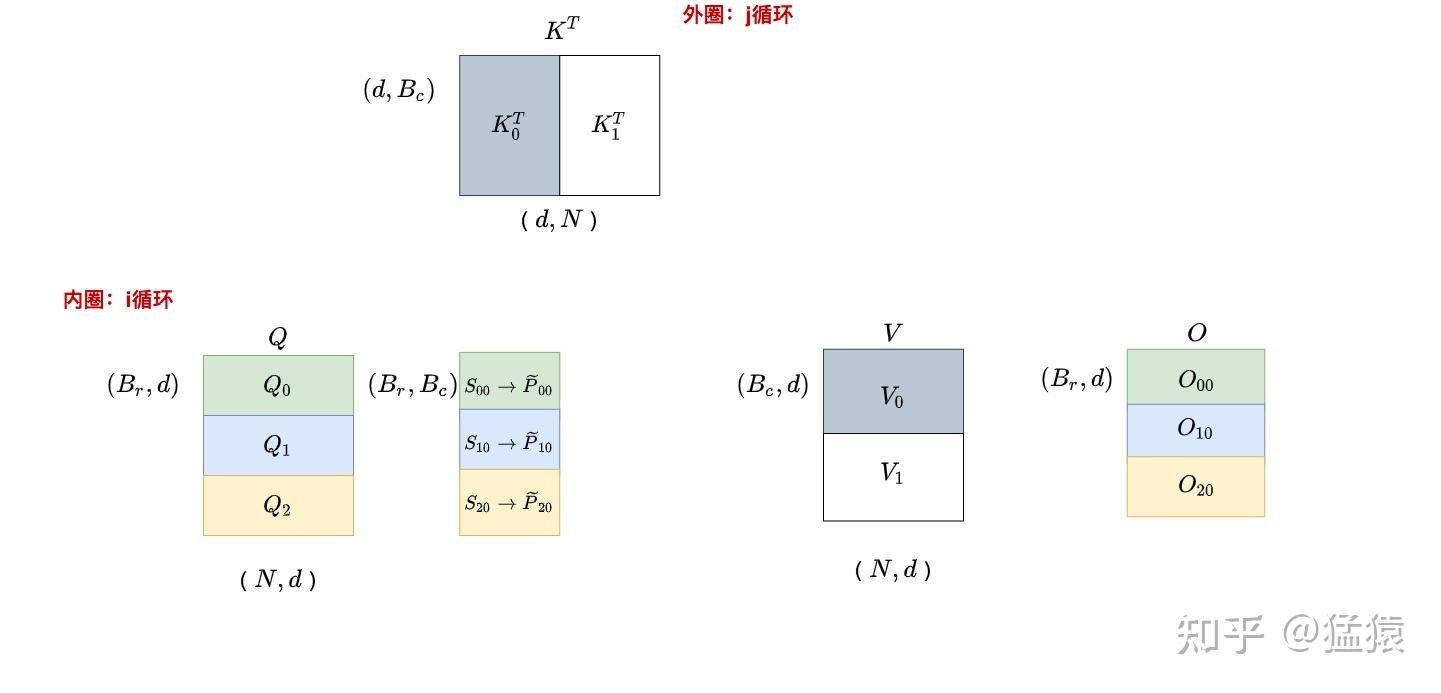
6.2.2 核心技术
| 技术 | 说明 |
|---|---|
| Tiling(分块) | 将 Q、K、V 分成小块,每块可完全放入 SRAM |
| Kernel Fusion(算子融合) | 将多个计算步骤合并为单一 CUDA kernel,减少数据传输 |
| Recomputation(重算) | 反向传播时重新计算中间结果,用计算换存储 |
| Online Softmax(在线 Softmax) | 分块计算 Softmax,无需完整注意力矩阵 |
分块 Softmax 的数学原理:
传统 Softmax 需要完整向量,但可以通过引入统计量 $(m, \ell)$ 实现分块计算:
$$m(x) = \max_i x_i, \quad f(x) = [e^{x_1 - m(x)}, \ldots, e^{x_B - m(x)}], \quad \ell(x) = \sum_i f(x)_i$$
对于分块向量 $x = [x^{(1)}, x^{(2)}]$: $$m(x) = \max(m(x^{(1)}), m(x^{(2)})), \quad \ell(x) = e^{m(x^{(1)}) - m(x)} \ell(x^{(1)}) + e^{m(x^{(2)}) - m(x)} \ell(x^{(2)})$$
6.2.3 FlashAttention 前向过程
效果:
- HBM 读写量从 $O(N^2)$ 降到 $O(N)$
- 训练速度提升 2-4×
- 推理延迟降低 2-4×
- 支持更长序列(内存效率提升)
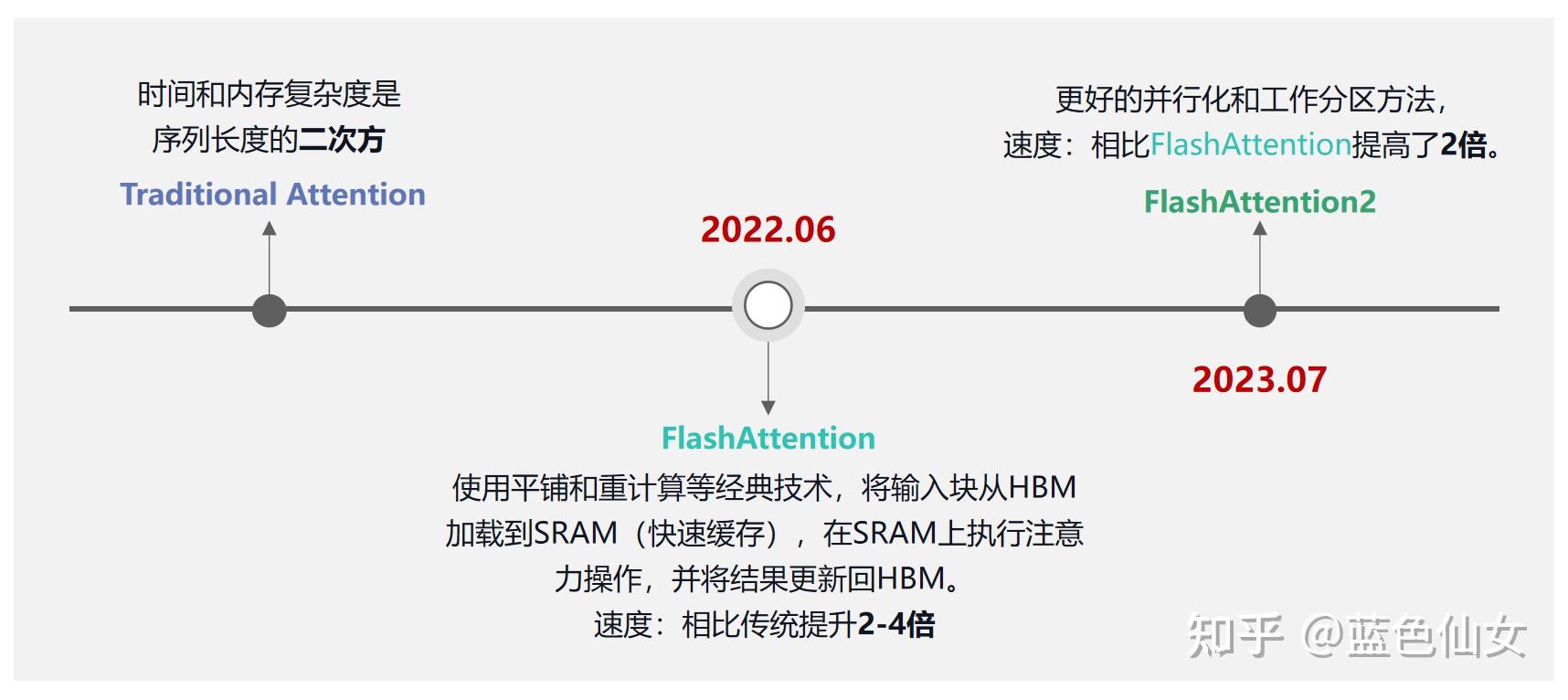
FlashAttention 版本演进
- FlashAttention-1:基础分块和融合,2022年发布
- FlashAttention-2:优化并行性(交换内外循环),减少 SRAM 读写,速度提升 2×
- FlashAttention-3:支持 Hopper 架构(H100),利用 Tensor Core 异步执行
6.3 KV Cache
LLM 推理采用自回归解码,每生成一个 Token 都需要之前所有 Token 的 Key 和 Value。
 KV Cache 工作原理
KV Cache 工作原理
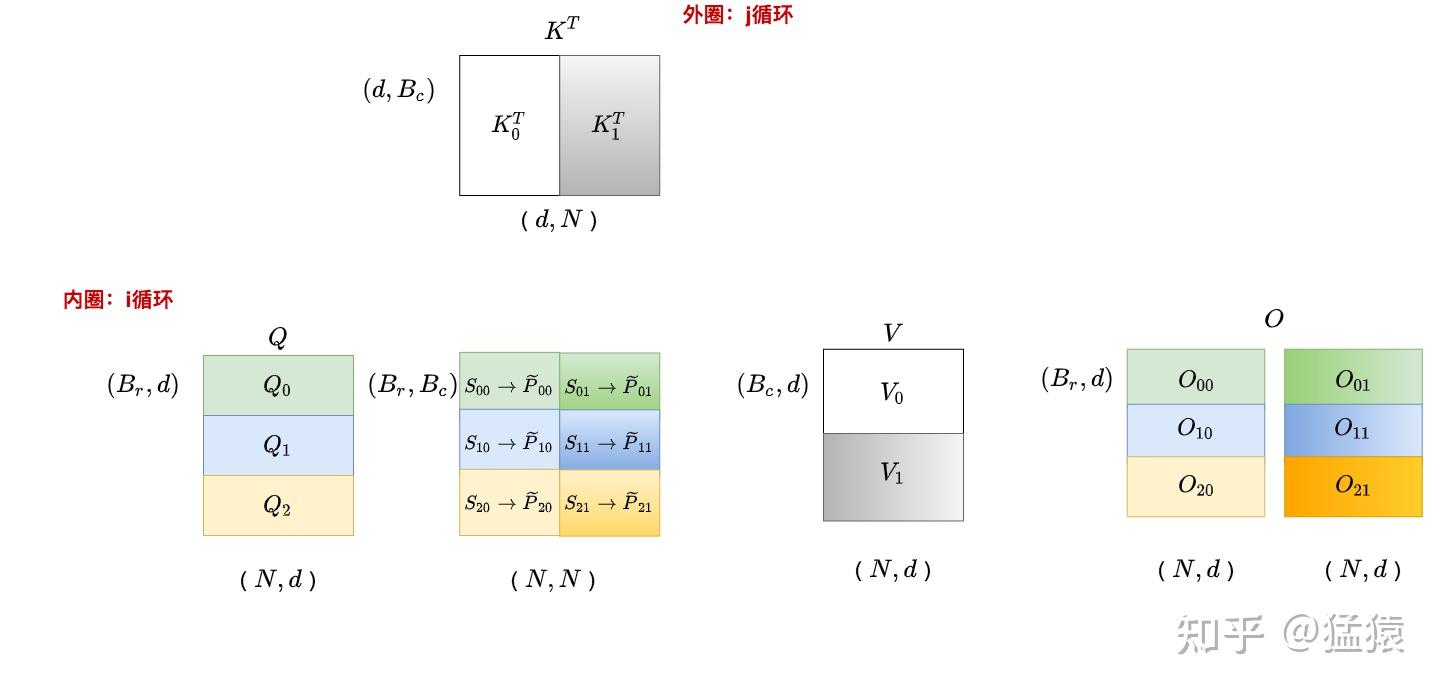 FlashAttention V2 并行计算优化
FlashAttention V2 并行计算优化
6.3.1 为什么需要 KV Cache
问题:自回归生成时,每生成一个新 Token 都需要对所有历史 Token 计算 Attention。如果每次都重新计算所有 K、V,计算量随序列长度线性增长,导致推理效率极低。
解决方案:缓存已计算的 K、V 值(KV Cache),避免重复计算。
6.3.2 推理两阶段
| 阶段 | 说明 | 特点 |
|---|---|---|
| Prefill(预填充) | 处理输入 Prompt,计算并缓存所有 K、V | 计算密集,可并行 |
| Decode(解码) | 每步仅计算新 Token 的 K、V,追加到缓存 | 内存密集,顺序执行 |
6.3.3 KV Cache 大小估算
$$\text{KV Cache} = 2 \times L \times H \times D \times S \times \text{dtype_size}$$
其中:L=层数,H=注意力头数,D=头维度,S=序列长度
示例:LLaMA-13B(L=40, H=40, D=128)在序列长度 2048 时: $$\text{KV Cache} = 2 \times 40 \times 40 \times 128 \times 2048 \times 2 \text{bytes} \approx 1.7 \text{GB}$$
6.3.4 传统 KV Cache 的问题
- 内存碎片:序列长度动态变化,难以预分配连续内存
- 过度预留:为支持最大序列长度,预留大量未使用内存
- 显存浪费:传统方案导致 60%-80% 显存浪费
- 批处理受限:无法高效处理多个并发请求
6.4 PagedAttention 与 vLLM
UC Berkeley 开发,已成为 LLM 推理服务的事实标准 论文:Efficient Memory Management for Large Language Model Serving with PagedAttention
vLLM 是一个开源的高性能 LLM 推理和服务库,已部署在 LMSYS Chatbot Arena 和 Vicuna Demo,每天处理数万请求。
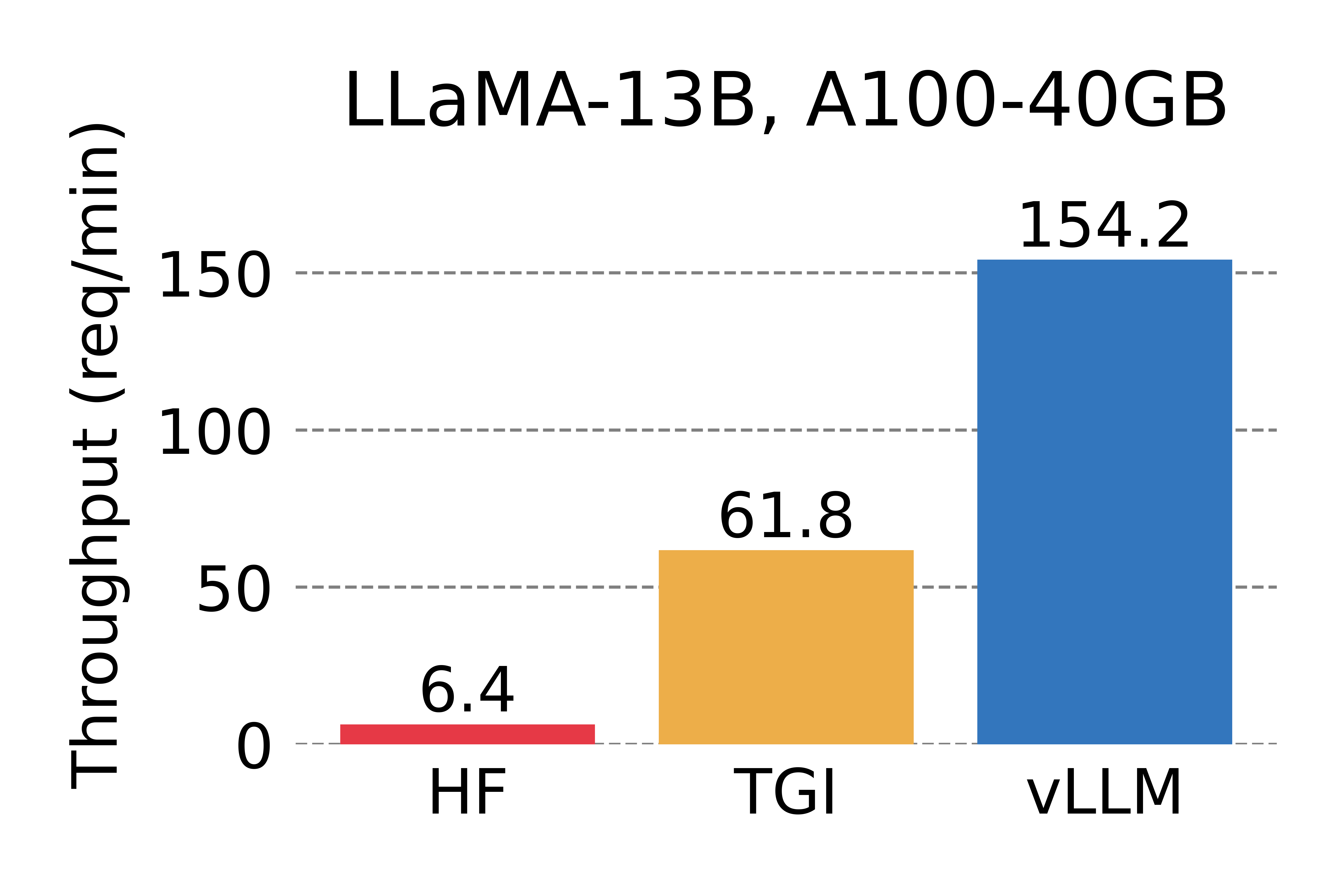 vLLM 吞吐量对比:A100 GPU
vLLM 吞吐量对比:A100 GPU
 PagedAttention:KV Cache 分块存储
PagedAttention:KV Cache 分块存储
 PagedAttention 请求生成过程
PagedAttention 请求生成过程
6.4.1 PagedAttention 核心思想
借鉴操作系统虚拟内存分页机制,解决 KV Cache 的内存管理问题:
- 传统方式:为每个序列预分配连续内存,导致碎片和浪费
- PagedAttention:将 KV Cache 分成固定大小的块,按需分配非连续物理内存
PagedAttention 机制:
| 概念 | 类比 | 说明 |
|---|---|---|
| Block(块) | 内存页 | 固定大小,存储若干 Token 的 K、V |
| Token | 字节 | 最小存储单位 |
| Sequence(序列) | 进程 | 拥有自己的逻辑地址空间 |
| Block Table(页表) | 页表 | 逻辑块到物理块的映射 |
6.4.2 关键优势
- 近乎零浪费:仅最后一个块可能有碎片,浪费 < 4%
- 动态分配:按需分配物理块,无需预留
- 内存共享:并行采样时共享 Prompt 的 KV Cache(Copy-on-Write)
- 高效批处理:可同时处理更多请求
6.4.3 内存共享机制
在并行采样(Parallel Sampling)场景中,多个输出序列共享同一个 Prompt:
Copy-on-Write:当某序列需要修改共享块时,才复制一份新块,最大化内存复用。
6.4.4 vLLM 性能
| 对比 | 吞吐量提升 |
|---|---|
| vs HuggingFace Transformers | 14-24× |
| vs HuggingFace TGI | 2.2-3.5× |
内存共享效果:并行采样和 Beam Search 内存占用降低 55%,吞吐提升 2.2×
实际部署数据(LMSYS):
- 日均处理 3万+ 请求,峰值 6万
- GPU 使用量减少 50%
- 支持 Vicuna、LLaMA、Dolly、StableLM 等多种模型
6.5 投机采样(Speculative Decoding)
原理:利用 LLM 推理是"访存密集型"特点,用小模型加速大模型。
工作流程:
- 草稿阶段:小模型(如 7B)快速自回归生成 k 个候选 Token
- 验证阶段:大模型(如 70B)一次前向传播并行验证所有候选
- 接受/拒绝:根据概率分布决定接受多少候选
效果:
- 延迟降低 2-3×
- 数学上保证与大模型输出完全一致
- 草稿越准确,加速比越高
6.6 推理引擎对比
| 特性 | vLLM | TensorRT-LLM | TGI | SGLang |
|---|---|---|---|---|
| 核心技术 | PagedAttention | Kernel Fusion, FP8 | Router 架构 | RadixAttention |
| 优势 | 高并发、易用 | 极致低延迟、N卡优化 | 生态兼容 | 结构化生成 |
| 部署难度 | 低 | 高 | 中 | 低 |
| 吞吐量 | 极高 | 高 | 中 | 极高 |
| 开源 | ✅ | ✅ | ✅ | ✅ |
vLLM 快速开始
# 安装
pip install vllm
# 启动 OpenAI 兼容服务
python -m vllm.entrypoints.openai.api_server --model lmsys/vicuna-7b-v1.37. 模型压缩与部署
7.1 量化技术
| 方法 | 精度 | 速度提升 | 质量损失 |
|---|---|---|---|
| FP16 | 16-bit | 2 | 几乎无 |
| INT8 | 8-bit | 4 | 轻微 |
| INT4/NF4 | 4-bit | 8 | 可接受 |
| GPTQ/AWQ | 4-bit | 8 | 优化后极小 |
7.2 知识蒸馏
大模型(Teacher)指导小模型(Student)学习,保留核心能力同时大幅减少参数量。
学习路线与资源
深度系列文章
| 模块 | 文章 | 简介 |
|---|---|---|
| 全流程 | 一个大模型落地的技术详解 | 预训练微调蒸馏强化学习 |
| 数据 | 垃圾进垃圾出:高质量微调数据集 | 数据清洗、格式、质量评估 |
| PEFT | 大模型微调的省钱秘笈 | LoRA/Adapter/Prefix 对比 |
| 对齐 | 从 PPO 到 DPO | RLHF 三阶段流程详解 |
| 部署 | 压缩巨兽:模型压缩底层科学 | 量化/剪枝/蒸馏技术 |
| 词表 | 词表构建技术深度剖析 | BPE/Unigram、词表扩充 |
开源框架
| 框架 | 说明 |
|---|---|
| Hugging Face TRL | RLHF/DPO 训练库 |
| LLaMA-Factory | 一站式微调框架 |
| DeepSpeed | 分布式训练优化 |
| Megatron-LM | NVIDIA 大规模训练框架 |
| vLLM | 高性能推理引擎 |
重要论文
| 论文 | 说明 |
|---|---|
| Attention Is All You Need | Transformer 原始论文 |
| RoPE | 旋转位置编码 |
| LoRA | 低秩适配 |
| InstructGPT | RLHF 经典论文 |
| DPO | 直接偏好优化 |
| FlashAttention | 高效注意力计算 |
| Mamba | 状态空间模型 |
注:本文基于 2024-2025 年行业前沿研究整理。LLM 技术栈仍在快速演进中。